
{kind=link}
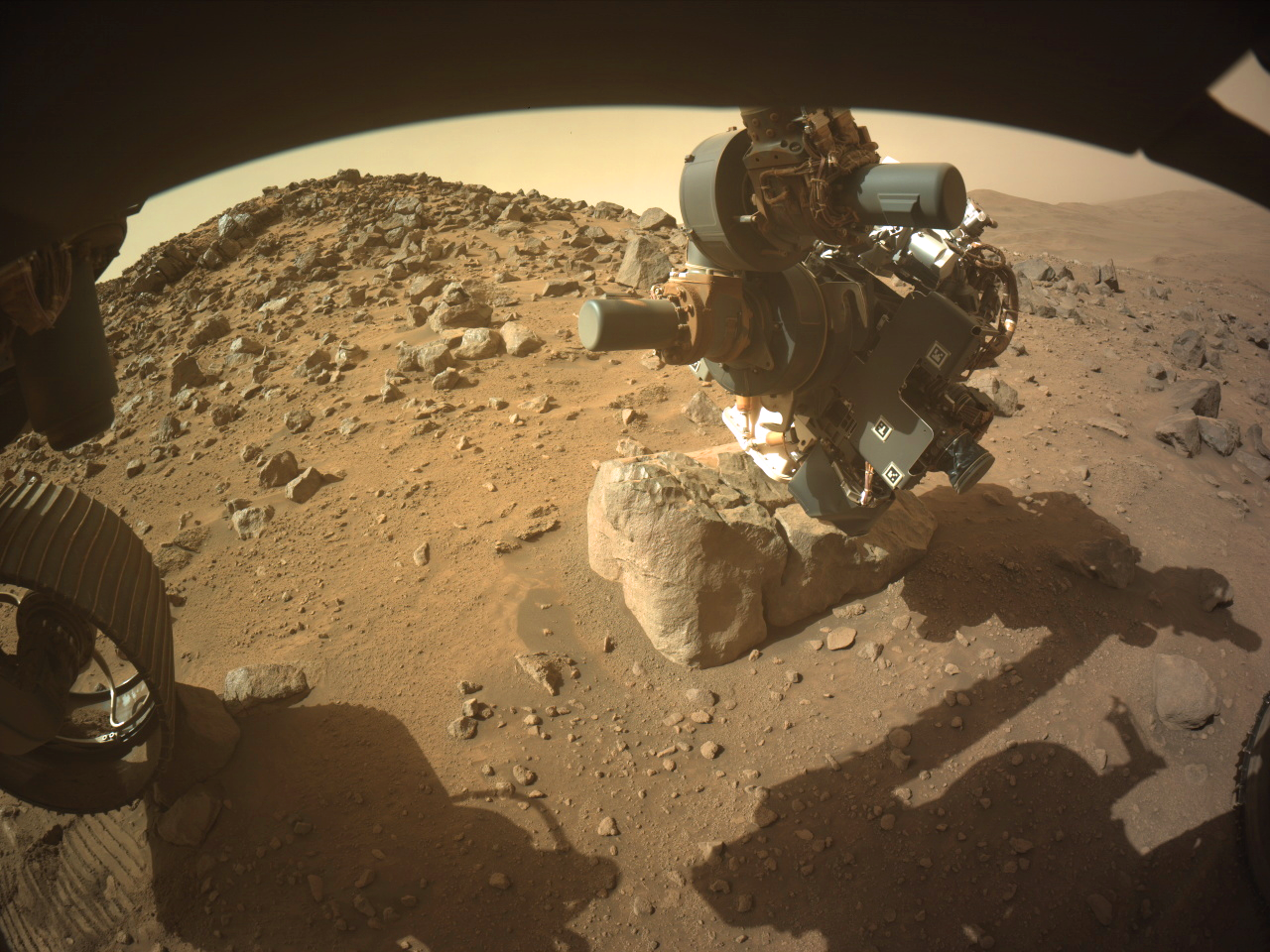
Despite one of the front wheels and the diagonally opposite rear wheel being perched on rocks they commanded the robotic arm to acquire close up images (WATSON) of the surface of this small boulder.
They were probably confident that the rover would not slip. In the past, the use of the arm to obtain close-ups using the turret mounted cameras have meant a delay as the rover was repositioned to firm ground, as s slip could damage the rover.
This image is from the front-left HazCam
NASA/JPL-Caltech
You must log in or register to comment.