{kind=link}
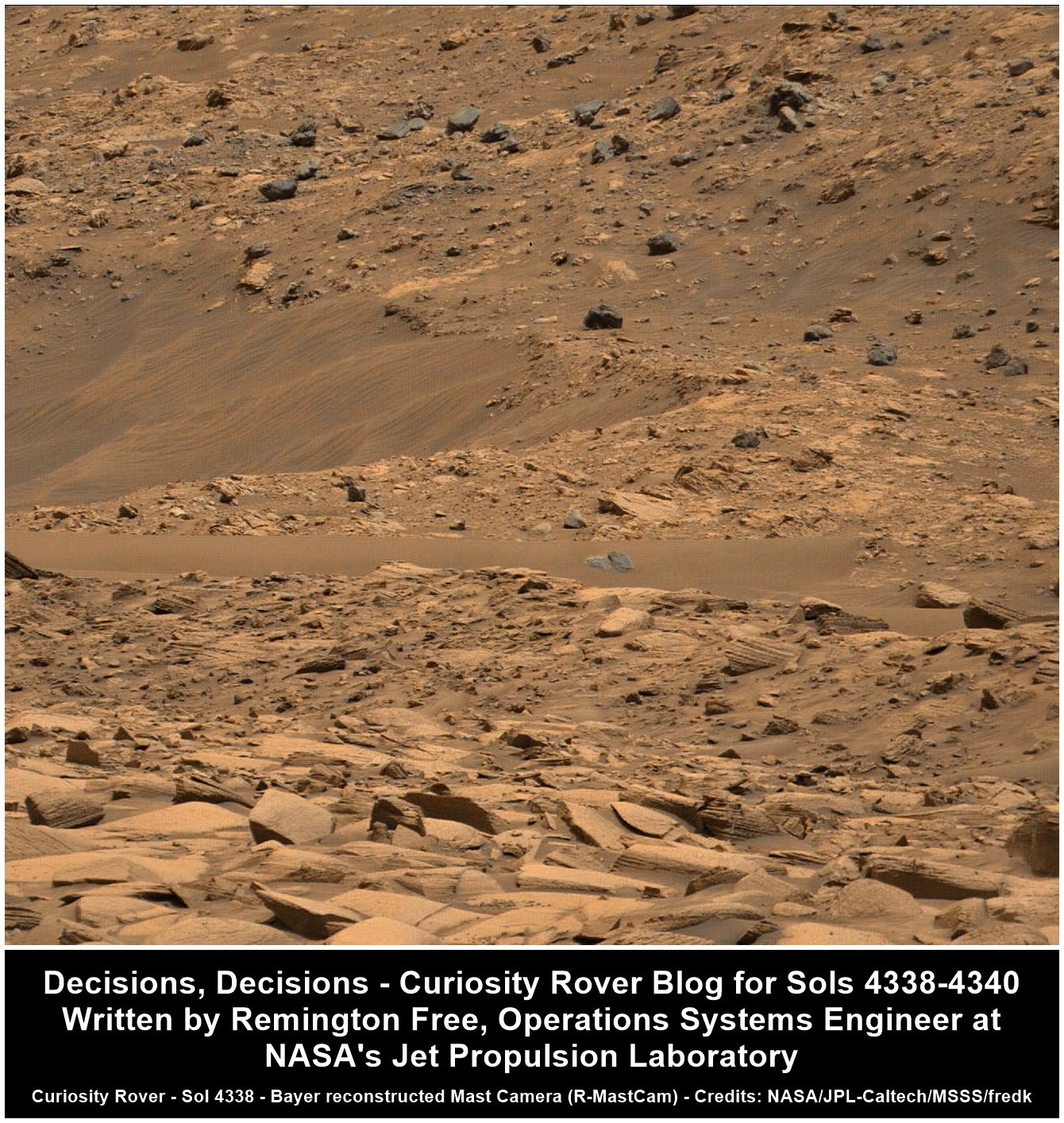
Decisions, Decisions - Curiosity Rover Blog for Sols 4338-4340. Earth planning date: Friday October 18, 2024
On sol 4338, we have a science block planned as well as some arm activities. Our science activities include a ChemCam observation of “Donkey Lake.” This is a bedrock target with exposed laminations. In geology, lamination is a sequence of small-scale, embedded fine layers of sedimentary rock. Next, we will do an RMI mosaic as well as Mastcam imaging on “Fascination Turret" to document the boulder configuration for study of both debris flow and rock deposition processes. We’ll also do a Navcam dust devil survey to study the Martian atmosphere, before moving into our arm backbones. We’ll perform a DRT and APXS on several bedrock targets with exposed layering. An exciting sol for geology!
Sol 4339 presented some interesting decisions for our planning team to make. We started out with a science block. This included a ChemCam LIBS analysis on a soil target with interesting color differences. We also performed an RMI mosaic and Mastcam imaging of “Whitebark Pass” to study possible surface erosion. After this science block, we planned to do a long traverse, which is where planning got a bit tricky.
The drive was a bit complicated to plan. The terrain had lots of rocks which ultimately prevented us from planning a guarded drive (i.e., a drive using auto navigation), which would have extended the drive length. There are occlusion considerations — we always want to end the drive in a good orientation for a communications link. When evaluating our end of drive, there are potential configurations where the line of sight for communications would be blocked, either due to terrain or due to objects on the rover deck. Here, because of the many and large size of rocks in our terrain, we were not confident that auto-navigation would not fault and position us in a bad orientation for our next communications window. With this risk, we decided to take a shorter drive with a sure unoccluded end-of-drive orientation. As planned, our drive will reach about 27 meters (almost 89 feet), whereas a guarded drive if the terrain was better might have yielded around 50 meters (about 164 feet). After the drive, we’ll take some imaging and do a Mastcam survey to observe soils along the traverse path.
On sol 4340, we planned for two science blocks. The first included a ChemCam AEGIS activity — this will allow the rover to examine its surroundings and pick out some interesting targets for analysis. We will also perform a Navcam dust devil movie to capture any interesting dust activities in the atmosphere. Next, we’ll move into our second science block, which is focused on environmental science. We’ll first take Mastcam tau observations, which will allow us to study and measure the optical depth of the atmosphere, which is often used as a proxy to understand the dust in the atmosphere. We’ll also do some early morning remote science, including Navcam cloud movies at zenith and at suprahorizon.
Written by Remington Free, Operations Systems Engineer at NASA’s Jet Propulsion Laboratory
Source for this blog and the archive of all blogs (with all the links and the original raw images etc) https://science.nasa.gov/blog/sols-4338-4340-decisions-decisions/
These blog updates are provided by self-selected Mars Science Laboratory mission team members who love to share what Curiosity is doing with the public.
Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
Image credits: NASA/JPL-Caltech/MSSS/fredk