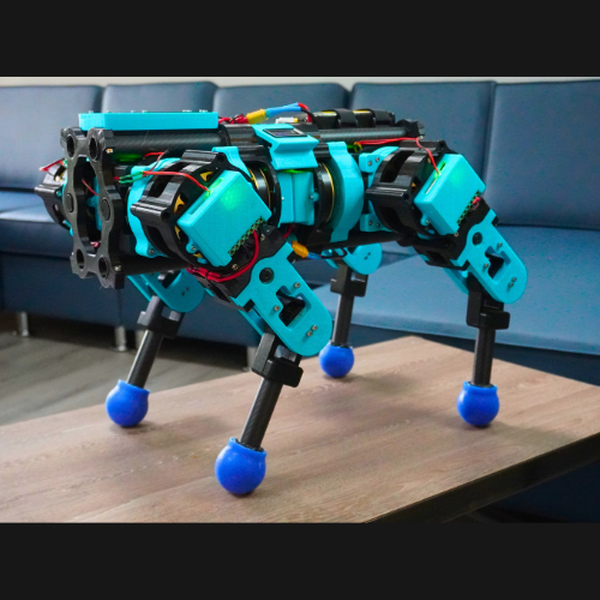
TOPS (Traverser of Planar Surfaces) or SPOT backward is a 12DOF quadrupedal robot. I have attempted robot dogs in the past, but nothing has come close to having the natural gait of an actual dog. In this project, the goal is to make a more dynamic quadrupedal robot. Website (Project Overview and Interactive Models): http://aaedmusa.com/projects/tops GitHub (CAD, Code, BOM, etc...): https://github.com/aaedmusa/TOPS This project was heavily inspired by James Bruton's openDog V3 robot. openDogV3: https://www.youtube.com/watch?v=eKZIJwJBjEs