
One key objective for scientists developing robots is to provide them with a sense of touch similar to that of humans so they can grasp and manipulate objects in a way that’s appropriate to the objects’ composition.
Researchers at Queen Mary University of London have developed a new low-cost sensor that can measure parameters directly that other sensors often don’t take into consideration in order to achieve a higher measurement accuracy, they said.
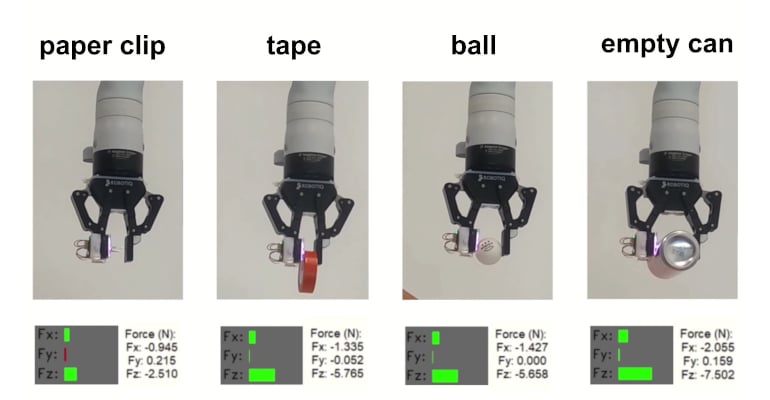
“The L-3 F-TOUCH measures interaction forces directly through an integrated mechanical suspension structure with a mirror system achieving higher measurement accuracy and wider measurement range,” he said. “The sensor is physically designed to decouple force measurements from geometry information. Therefore, the sensed three-axis force is immunized from contact geometry compared to its competitors.”
Paper
L3 F-TOUCH: A Wireless GelSight With Decoupled Tactile and Three-Axis Force Sensing
Abstract
GelSight sensors that estimate contact geometry and force by reconstructing the deformation of their soft elastomer from images would yield poor force measurements when the elastomer deforms uniformly or reaches deformation saturation. Here we present an L 3 F-TOUCH sensor that considerably enhances the three-axis force sensing capability of typical GelSight sensors. Specifically, the L 3 F-TOUCH sensor comprises: (i) an elastomer structure resembling the classic GelSight sensor design for fine-grained contact geometry sensing; and (ii) a mechanically simple suspension structure to enable three-dimensional elastic displacement of the elastomer structure upon contact. Such displacement is tracked by detecting the displacement of an ARTag and is transformed to three-axis contact force via calibration. We further revamp the sensor’s optical system by fixing the ARTag on the base and reflecting it to the same camera viewing the elastomer through a mirror. As a result, the tactile and force sensing modes can operate independently, but the entire L 3 F-TOUCH remains L ight-weight and L ow-cost while facilitating a wireless deployment. Evaluations and experiment results demonstrate that the proposed L 3 F-TOUCH sensor compromises GelSight’s limitation in force sensing and is more practical compared with equipping commercial three-axis force sensors. Thus, the L 3 F-TOUCH could further empower existing Vision-based Tactile Sensors (VBTSs) in replication and deployment.
Warning: website has a really obnoxious pop-up.