
I want to mount a printed part to a standard 2mm motor axis which doesn’t have any dents or profile. Its just round. If I print at exactly 2mm, it fits for the first few times until it gets too lose and the spinning part sometimes falls off.
2mm is obviously too small for a grub screw. You’re going to need a brass adapter or glue. Either way, it’s probably not coming off (easily) when it’s on there.
Clamp it.
Sand a flat to create a D profile and then use a shaft collar and set screw
That you’re looking for is called a flange mount. If you search your favorite search engine with “2mm flange mount” you’ll find some results. I do wonder how much torque you’ll be able to transfer, but given the shaft size I suspect you’re not looking at big loads.
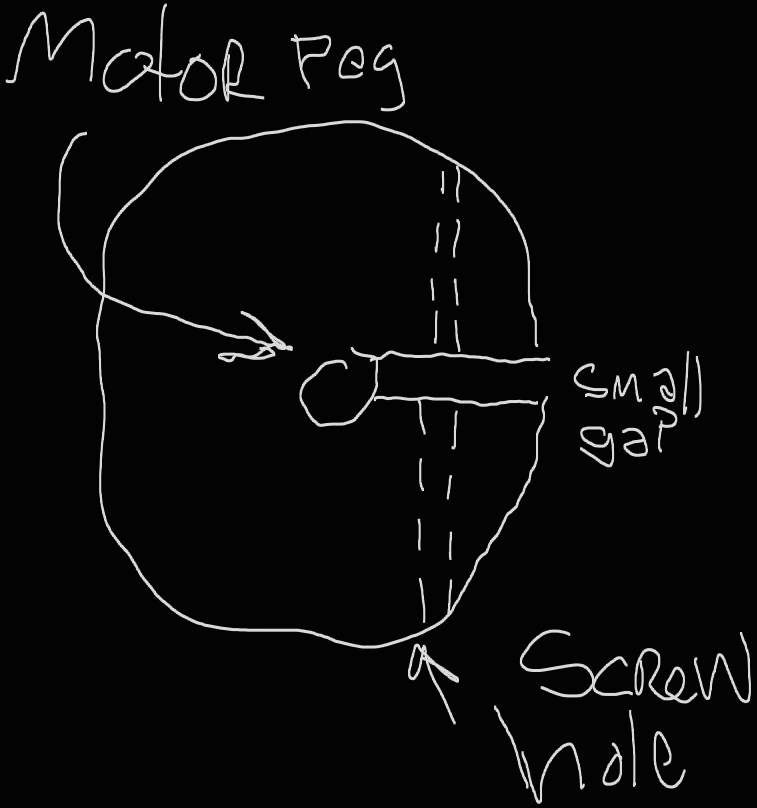
Instead of making the hole the exact size, make a small gap so you can use a screw and nut to clamp it down on the peg
But doesn’t that create an offset weight? My part will probably spin at several thousand RPM.
What is the plastic of your choice?
PLA, PETG, … behave like a very slowly flowing liquid as such the print will deform/expand (creep).
I will be using PLA
For production parts look at other materials. Nylon might still be within the range of your 3D-printer.
For attaching: If you can’t clamp then look at gluing it in place. If you need it detachable maybe drill a hole in the shaft and use a R-clip.
You can also tap and die the shaft on top. Make sure to use a left or right-handed thread depending on the rotation/load (thread is so that the rotation/force isn’t unscrewing it).
Rough sand the axis and add glue